6 |
Oilfield Technology
May
2015
Seismicsensors
Digital sensors based on MEMS accelerometer technology were
introduced in the market a little over 10 years ago, challenging many
of the practices and beliefs related to deployment strategies. This
turned sensors into a controversial topic almost immediately. The
modern commercial analogue sensor is a marvel of engineering
development that few people in the seismic industry are positioned
to appreciate. Produced in quantities measured in millions and
refined by years of development, the geophones used today are so
good that few geophysicists question their performance. Meaningful
comparison with field data between one geophone brand and
another is problematic. This has led to what sensor engineers call
‘specsmanship’, an attempt to differentiate competing commercial
geophone products with slightly better technical specifications on
the certain belief that given the choice, better technical specifications
will always claim the sale. Sadly the dynamics of the industry seldom
make this true. However, specsmanship is a footnote to the
real issue.
The fundamental properties of the geophone and its
deployment strategy have been under siege for at least
10 ‑ 15 years. A 3D project in the mid 1990s deployed
thousands of geophones with linear arrays. A 3D project
in North America today is unlikely to deploy arrays larger
than about 10 to 15 ft in diameter, usually with six or fewer
geophones. This is a compromise of sorts; geophysicists
have realised the negative impact of large arrays on the high
frequency aspect of the broadband signal. In addition large
arrays bias the directional sampling of the project and its
relationship to the anisotropic effects of the earth.
Enter into the fray the digital sensor. No less of an
engineering marvel than the analogue geophone, it
simply has different properties. The specsmanship side of
the argument gets into details like phase and amplitude
response. Digital sensors frankly win this argument; they
have nearly flat phase and amplitude response across a
broader bandwidth than analogue sensors do. The analogue
geophone is so loved and accepted in this industry that
experts still argue, with a tenacity that borders on fanatical,
that the spec differences are insignificant because geophone
responses can be fixed in processing, but as mentioned
before, the specs are a footnote. The digital sensor
is designed to be a single point sensor and it is
not intended to be deployed as an array. This is
the foundation of the controversy that surrounds
sensor development. It is an unquestionable fact
that a 60‑fold 3D survey acquired with arrays of
12 analogue geophones is essentially a 720‑fold
survey with respect to random noise attenuation.
If two sweeps are performed per shot point,
the fold doubles to 1440; however, it is very
debatable how much of the noise seen in the raw
field records is random noise and how much is
coherent noise. It is simply not the case that single
point sensor acquisition produces unacceptable
results, so a great deal of the random noise
attenuation benefit is in question.
The debate is further fogged by the
introduction of high density shooting and other
factors, but the data does not support the
conclusion that single point sensor data is as
bad as some would argue it should be, and it has
been shown to be superior on many projects. But
unlike the vibrator conclusion, more sensors and higher fold have
always produced better results. It is not simply a matter of deploying
more sensors on the ground; it must be done in an intelligent way
and optimised for the region and target, and constrained by proven
sampling theory. Acquisition of more unique source/sensor trace
pairs is needed – not just higher fold. The diversified sampling of any
event not only reduces random noise, but it also reduces coherent
noise.
Thedigital sensor isunique
The digital sensor brings two additional aspects to the sensor
controversy. Engineers believe that the specmanship fight can be
won. In this case the competition is not the competing company, but
the earth itself. Detailed noise analysis of the earth has produced
models of the earth noise (McNamara, 2003). It is thought that
in the future a sensor can be made which has a self‑noise level
Figure 7.
Picture shows amodemanalogue geophone, IONSM‑24.
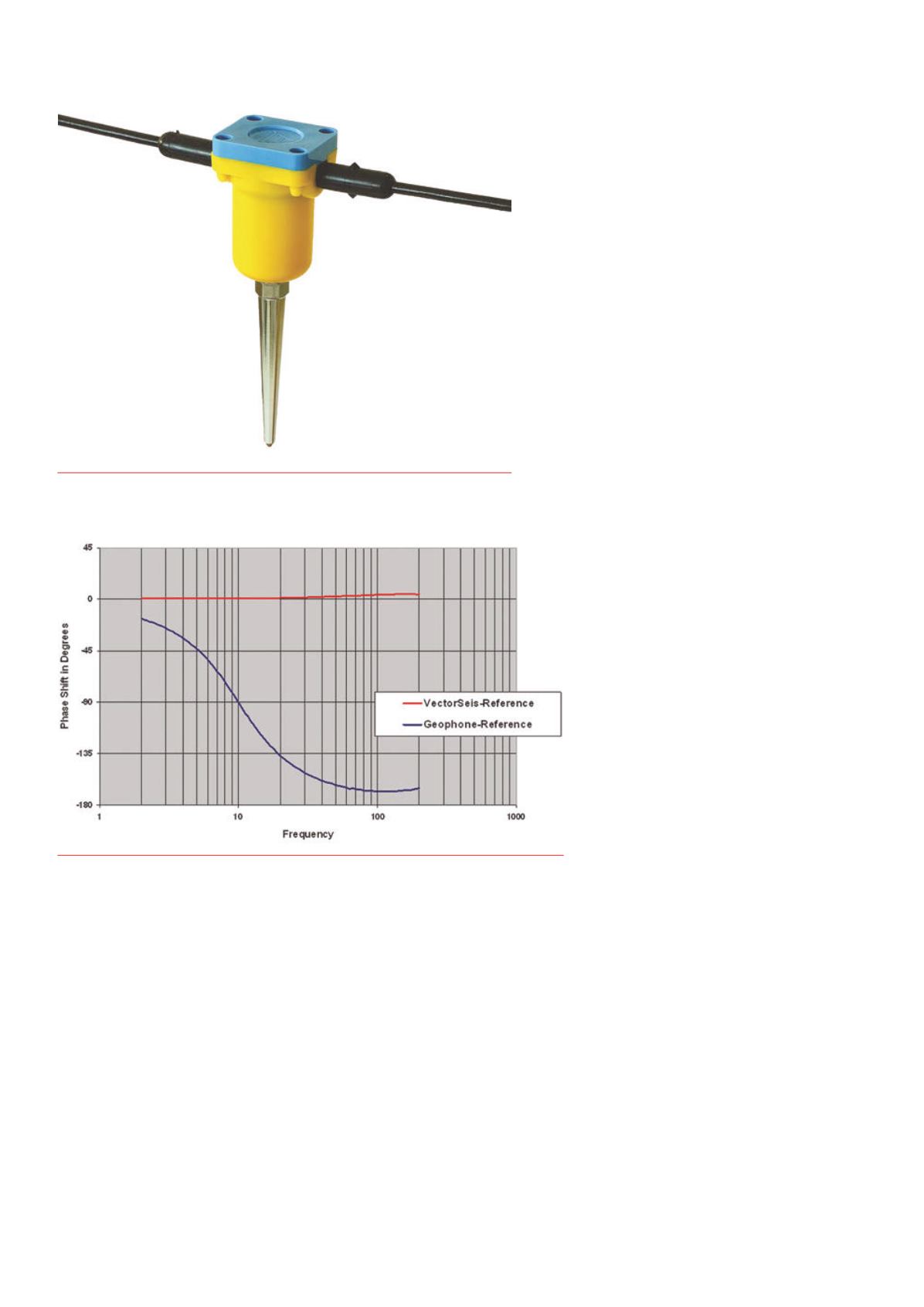
Figure 8.
Plot shows the digital sensor phase response in red compared to the 180˚ phase roll of
the analogue geophone inblue.


